

如何在windows中搭建ros2开发环境
1.wsl的安装
以管理员模式打开powershell,输入wsl –install 命令,然后重新启动计算机
wsl --install2.ubuntu的安装
安装的时候会要求输入用户名和密码,这个要记住,后面会用到
wsl --install -d Ubuntu-22.043.修改ubuntu的地址
在ubuntu安装时系统会默认给安装在c盘,一不小心就会占用大量c盘空间,所以我们需要将路径进行修改,放到合适的地方
(1)使用wsl -l -v查看wsl虚拟机的名称与状态
wsl -l -v
(2)输入wsl –shutdown –all 停止wsl的运行
wsl --shutdown -all再次查看发现已经是stopped的状态了

(3)在目标位置创建一个目录存放新的wsl,我这里的路径是F:\ubuntu_wsl
(4)导出备份
wsl --export Ubuntu-22.04 F:\ubuntu_wsl\ubuntu.tar(5)确定在目录下可以看见备份的文件后注销掉原来的wsl
wsl --unregister Ubuntu-22.04(6)将备份恢复到目标位置
wsl --import Ubuntu-22.04 F:\ubuntu_wsl F:\ubuntu_wsl\ubuntu.tar(7)恢复默认用户
之前在安装ubuntu的时候注册了一个用户名,同时也有一个密码
这里格式是 linux发行版名称 config –default-user 原本用户名
例如:
Ubuntu2204 config --default-user johan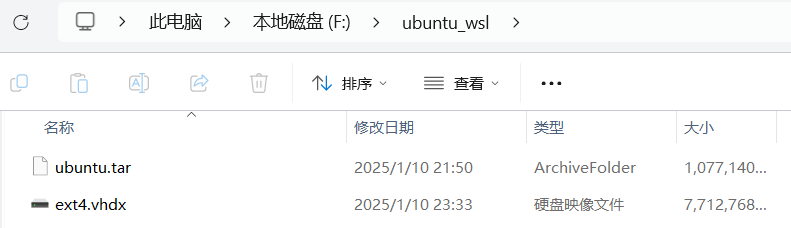
你会发现有一个ext4.vhdx出现在你的路径下,这是已经将wsl从c盘转移到了你的目标位置
4.ros2安装
进入wsl后使用脚本一键安装
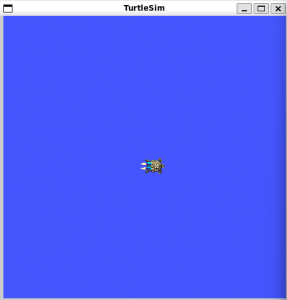
wget https://fishros.com/install -O fishros && bash fishros安装完成后重新在一个终端打开wsl并输入
ros2 run turtlesim turtlesim_node会出现一个小海龟,表示你已经安装成功了
5.编程环境配置
在windows上安装vscode,然后安装wsl的插件安装好后,点击此处连接,就可以和在linux的vscode中开发一样进行windows下的开发了


written by johan